Adaptively Directed Aeroshell using Multipurpose Actuators (ADAMA)
Full original design credit to NASA's ADEPT team, and the work of others that NASA built from.
The goal of this project is to design a craft that can be transported to a suitable altitude in a compact configuration, released, and then deploy a drag-producing device to achieve a slow, controlled, and automated descent, without the need for additional parachutes.
March 2024
The first prototype was designed to test methods to articulate control surfaces in a precise manner while retaining the overall rigidity of the structure.
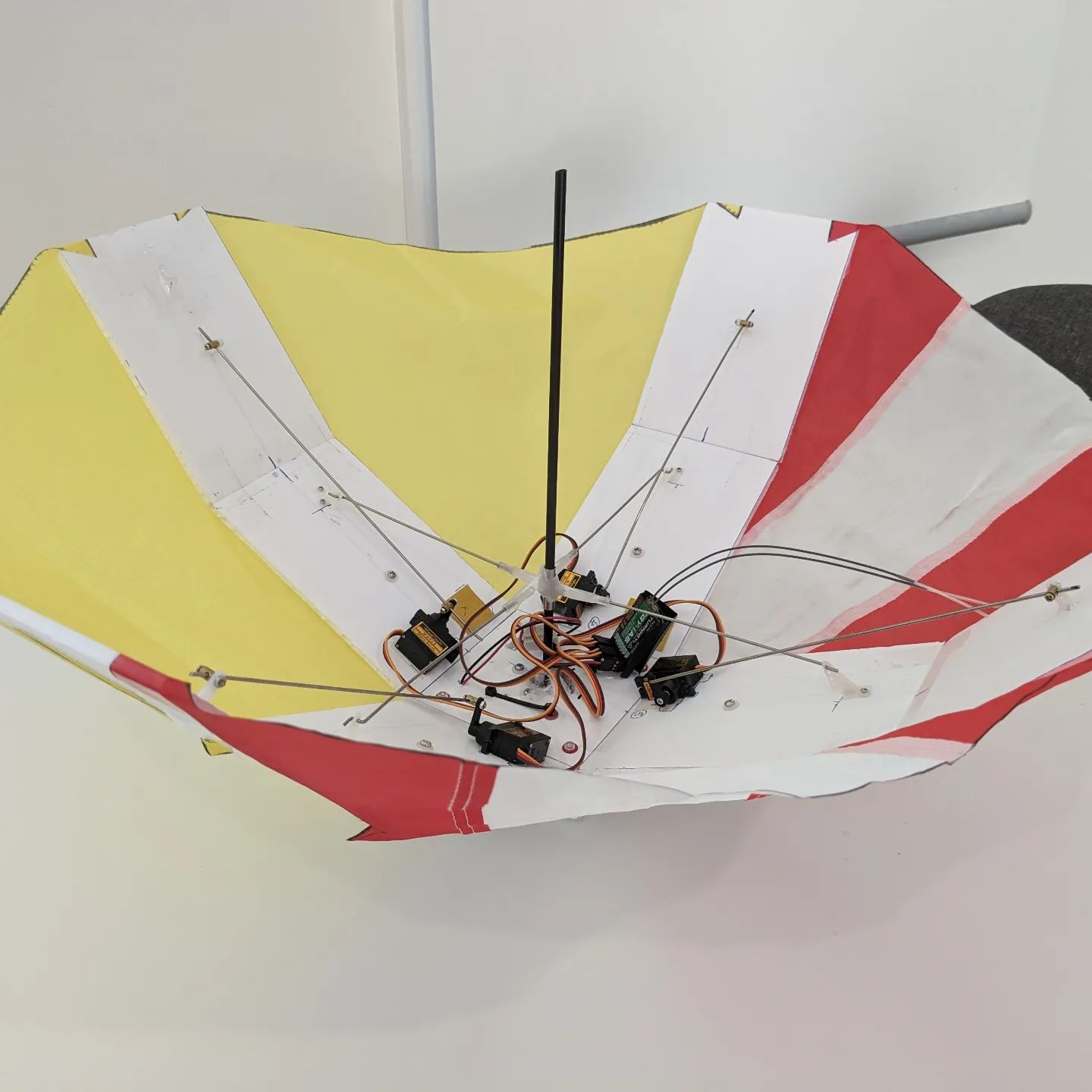
Constructed from foam board and recycled kites (ripstop nylon), with hobby grade servos, this prototype was only dropped from a maximum altitude of 2.5 metres but demonstrated that trajectory control was possible by flexing the shape of the craft itself.
With a loaded weight of almost 300 grams, higher altitude flight tests of this first prototype were unfeasible at the time.